Consideration of a Controlled Ditch
Scenario for MH370
Yap Fook Fah
2016 April 14
According to the Inmarsat data, there are two plausible scenarios for the terminal phase of the MH370 flight after a Final Major Turn (FMT) and about another six hours of flight southwards. For ease of reference, I will refer to these as being the Uncontrolled Dive (UD) scenario, and the Controlled Ditch (CD) scenario.
The Uncontrolled Dive Scenario
This assumes a lack of human intervention and that the fate of the aircraft was left solely to the working of its machinery. The definition of the priority zone for the undersea sonar search currently in progress is partly based on this scenario.
The location along the 7th arc has been defined and prioritized by a consideration of: (i) The so-called Constrained Autopilot Dynamics, and (ii) Data Error Optimization (Figure 1). The former assumes that the plane flew by some well-known autopilot mode, while the latter ranked potential flight paths according to how well they fit the Inmarsat data, without regard to how the flight might have been executed.
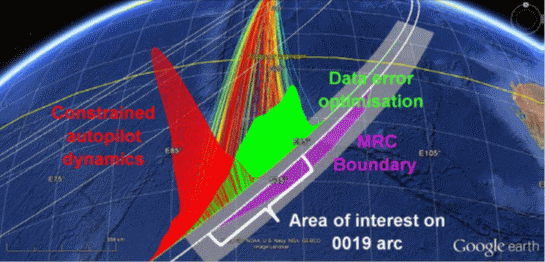
Figure 1: Representation of the probability distribution at the 0011 arc for constrained autopilot dynamics (red) and data error optimization (green). [1]
As regards the width of the search zone transverse to the arc, until recently this was defined by an assumption that the plane flew until fuel exhaustion, and, with no one at the controls, fell rapidly from the sky into the Southern Indian Ocean. The width has recently been increased to 60 nm from the 7th arc, to account for the possibility of a glide or controlled ditch.
The UD scenario has been considered the most likely because it fits the Inmarsat data by making the fewest and simplest assumptions. However, it offers no insight into the particular choice of probable flight paths and end zone, except that they are the most consistent with autopilot flight modes and Inmarsat data. Another issue that is becoming increasingly problematic for this scenario is that the undersea sonar search has not been fruitful so far since it started in October 2014.
The Controlled Ditch Scenario
In this scenario, there was someone at the controls right until the end, culminating in a controlled ditch (CD) into the sea. Naturally, a CD scenario begs the question of who was behind the controls, and the reason for his/her action. This study does not examine the “who” or the “why” of such a CD scenario. Personally, I do not think any of the pilots was responsible as I know of no evidence whatsoever that implicates them. Let us just term the person behind the act the ‘perpetrator’.
The scope of this study, therefore, is limited to a consideration of the “what” and the “how” of a CD scenario; that is:
- How would the position and length of the priority search zone along the 7th arc be different from that of the UD scenario?
- How would the width of the search zone be different?
- Given that a perpetrator did a CD, what can we deduce about the nature of the end-game flight path?
- The recent debris finds (see the report here) imply that there was a large amount of surface/floating debris; therefore we ask how much of the potential CD areas were covered by the aerial search soon after the loss of MH370, and how much has been covered by the ongoing undersea search?
It is not immediately obvious that the hotspot defined for the current search, as well as the spread of the search zone along the 7th arc, would remain the same if the CD scenario were adopted as an assumption, rather than the UD scenario. A CD scenario implies the presence of a perpetrator controlling the final leg of the flight, and this might alter the probability distribution for the search zone because it lends more weight to certain flight modes than others.
Table 1 lays out some of the implications that could be deduced from assuming a CD.
|
Controlled Ditch |
which further | ||||
| 1 | implies that | there was a perpetrator at the controls, | implies that | the perpetrator wanted to minimize the force of the final impact. | |
| 2 | implies that | perpetrator wanted to minimize debris, | implies that | number of debris found might be small, mainly exterior parts. | |
| 3 | implies that | action was premeditated, with an intention to make the plane vanish without trace, | implies that | flight route was carefully planned to avoid detection as much as possible. | |
| 4 | requires that | ocean surface was visible at time of ditching, | implies that | end point was in a daylight region. |
Table 1: Implications of a Controlled Ditch scenario
Assuming that a CD implies an intention to make the plane vanish without any trace, Table 2 lays out some of the constraints on the end-game flight path.
|
Avoiding detection during flight and hiding the plane |
1 | requires that | the plane flew to some remote ocean area for ditching. |
| 2 | requires that | plane flew under cover of darkness to avoid satellite detection. | |
| 3 | requires that | plane flew to fuel exhaustion to minimize risk of explosion on impact and oil leak after crash. | |
| 4 | requires that | the end point is in daylight region shortly before arrival, so that the ocean surface was visible at time of ditching. | |
| 5 | requires that | plane flew a precise end-game path, controlled by autopilot, until the time to ditch at target area. |
Table 2: Plausible constraints on the flight path.
It is also reasonable to assume that the perpetrator did not know that the Inmarsat pings could be used to track the flight, and so the end-game flight path would just be a simple, straight path controlled by autopilot that would achieve the objectives of Table 2. Referring to Figure 1, such a path would be in the Constrained Autopilot Dynamics zone with probability distribution shown in red. In contrast, the Data Error Optimization zone (in green) would be given much less weight as they pertain to more unusual, curved paths.
The first deduction from this study, therefore, is that the CD zone (i.e. where the aircraft is more likely to have ended its flight under the CD scenario) is weighted more toward the southern end of the arc, between 35S and 39S.
Nature of the southern flight path
From the point of view of the perpetrator, a feasible approach to determining a flight path for the CD scenario involves the following steps.
Step 1: Determine the amount of fuel remaining before the FMT at around 1830 UTC, and estimate the time to fly to fuel exhaustion.
Step 2: Work out the sunrise line at, say, 15 minutes before fuel exhaustion. For example, if fuel exhaustion is estimated to be at 00:10 UTC on 2014 March 08, then at this time the plane should reach a location that has a sunrise 15 minutes earlier, i.e. at 23:55 UTC March 7. The pink line shown in Figure 2 are locations that have an apparent sunrise at this time.
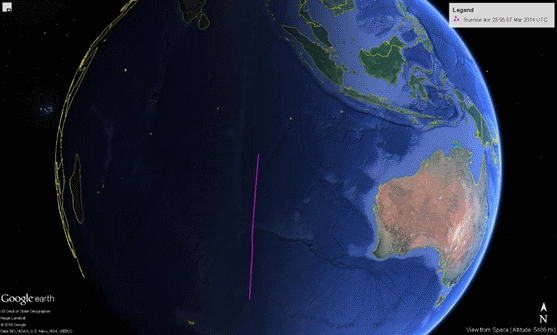
Figure 2: Sunrise line at 23:55 UTC on 2014 March 7.
Step 3: Work out the aircraft performance boundary; for example, see Figure 3 below.
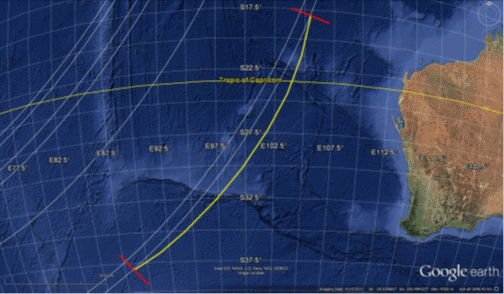
Figure 3: Aircraft performance boundary for MH370 [2].
Step 4: The location to aim for is then the intersection between the sunrise line (Step 2) and the fuel performance boundary (Step 3).
It might not be straightforward to work out Step 3 precisely, as the performance boundary depends not only on the amount of fuel, but also the initial position, flight altitude and flight mode. Certainly this would be difficult to work out quickly.
There is, however, a much easier way which does not require Steps 3 and 4 at all. If the plane were to fly along the sunrise line determined in Step 2, then it could be sure to reach the fuel exhaustion point at precisely 15 minutes (or whatever pre-determined time interval) after sunrise.
In Figure 4, the sunrise line for 23:55 March 7, shown in pink, is overlaid with one of the best-fit autopilot flight paths worked out from the Inmarsat data (in white, 186.7 degree rhumb line). The flight path crosses the 7th arc (in red) within the hotspot at (37.6S, 89.0E). It is a notable coincidence that the sunrise line is almost collinear with that modelled flight path.
Note that the sunrise line also crosses the position (30S 90E). These could be a simple set of coordinates to enter into the Flight Management System (FMS) as a target waypoint (as discussed in a previous post on this website).
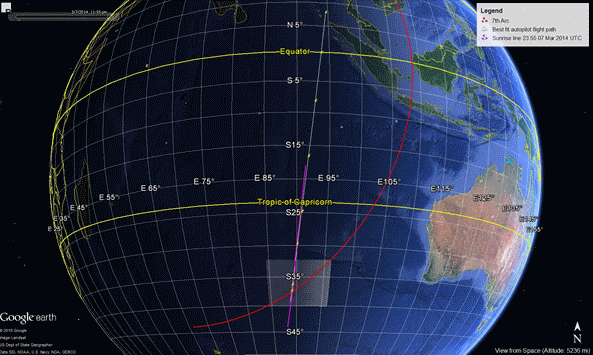
Figure 4: Sunrise line (pink) at 2355 UTC March 7 2014 overlaid with a rhumb line flight path (white) that crosses the hotpot on the 7th arc.
An animation that shows the sunrise effect as the end-game flight progressed can be obtained here. The yellow pin marks the position of the plane as it crosses the seven ping rings successively.
Extent of Controlled Ditch
The recent debris finds, if confirmed to be from MH370, are invaluable because we could at least conclude that (i) the plane flew to the Indian Ocean, and (ii) the plane broke up on impact with the sea, whether in an uncontrolled dive or a controlled ditch. Further, the type, size and condition of the debris might further inform on the likely mode of impact. So, given that there would be surface debris even in the event of a CD, I wanted to use the approach described here [3] to check if potential CD areas have been covered by aerial and/or undersea search.
The method applied was as follows. First, I selected a straight flight path as shown above that matches the BTOs and BFOs. Next, I extended the path for another 100 nm along the same rhumb line, assuming that the plane continued to a CD sometime after 00:19 UTC. The reason for the choice of 100 nm comes from [4], where the following text appears:
Glide area
A simulation was performed to determine the glide distance of the aircraft under active control to maintain wings-level attitude. The simulation (from FL330) resulted in the aircraft gliding for a total distance of approximately 125 NM from the point of the second engine flame-out.
In order to make this distance the aircraft would travel approximately 15 NM in the first 2 minutes of the descent (approximate time required to start the APU and initiate the log-on sequence). Therefore, from the 7th arc, the aircraft has the potential to glide around 110 NM. Due to the initial direction of travel and the wind conditions on the day, around 100 NM is a more realistic value.
The above results in Google Earth screenshots as shown in Figures 5 and 6. The aerial and undersea search areas are overlaid on the map and the daylight effect for 00:19 UTC March 08 2014 has been turned on (in Fig 5). The apparent sunrise time at 37.6S, 89.0E is 23:55 UTC Mar 07 2014 (i.e. a time stated previously above).
A second path has also been drawn in these graphics where, after reaching (30S, 90E), the plane headed directly south along 90E and flew for up to 100 nm after crossing the 7th arc.
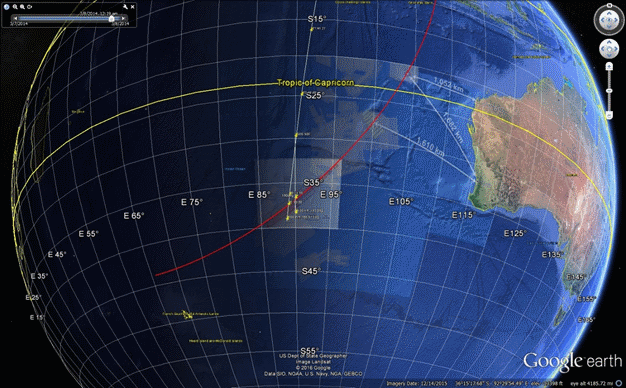
Figure 5: Modelled glide paths in the terminal phase.
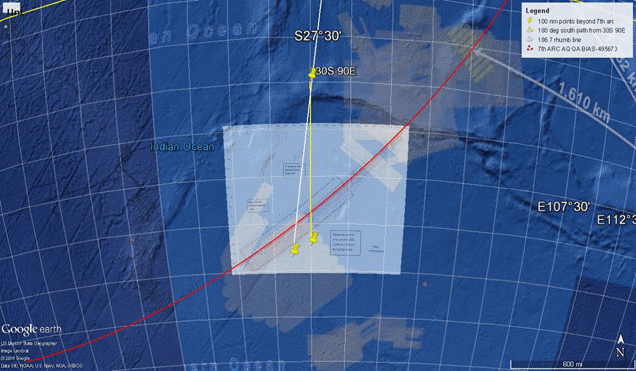
Figure 6: Zoomed in, with the solar lighting effect turned off to ease viewing.
Observations
- Most potential CD end points lie within the aerial or the already-scanned undersea search zones.
- Only a relatively small region of potential CD end points, centred around the path along 90E, would yield debris that would have drifted outside of the aerial search zone (i.e. to the northeast of the indicated end point at 90E in Figure 6).
- CD end points that extend to the west of 37.6S, 89.0E on the 7th arc also lie within the aerial search zone. Further, the lack of sunlight would make visibility more difficult for any controlled ditching in this area (i.e. this far west).
- CD end points to the east of 90E lie outside of the aerial search zone. However, such end points might require (i) a curved path, or (ii) a straight path with some loitering around 18:25 UTC, or (iii) navigation with a set of more complex waypoints, and (iv) a longer period of exposure to daylight during the flight.
Conclusions
- A controlled ditch would go some way toward explaining the nature of the end-game flight path, one that was designed to be flown by autopilot under cover of darkness, and emerge into sunlight at fuel exhaustion for a controlled ditch in the Southern Indian Ocean.
- The length of the potential CD area spans a shorter range of longitude than the current search zone, as it is constrained by the level of sunlight and simple, straight, autopilot flight paths. It could be further limited to areas that were not covered by the aerial search in the weeks after the crash.
- If a CD did happen, the potential end point would appear to lie in a smaller region than initially expected: see the pink area in Figure 7.
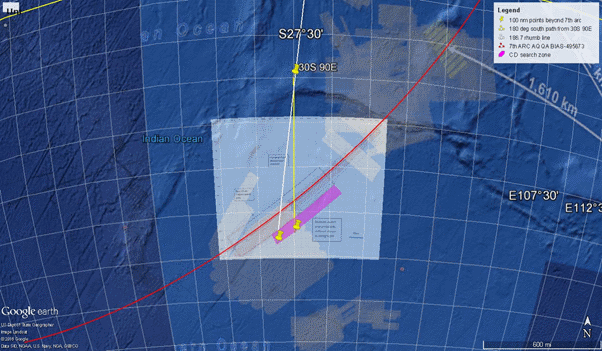
Figure 7: Potential CD area in pink.
4. If the current underwater search does not find MH370 wreckage by June 2016, it does not mean that the effort has been futile and that the Inmarsat data have been invalidated. It could simply be that the assumption of a steep dive at the end (the Uncontrolled Dive scenario) was wrong. The final resting place of MH370 could lie just a little further south.
To reiterate, the intent of the analysis in this report is not to argue that a controlled ditch certainly did occur, nor to suggest any specific person or motivation was responsible if this is actually what occurred. The intent is limited to exploring the implications of such an event (a flight culminating in a controlled ditch) having occurred in terms of what this might mean for the final location of MH370 referenced against the priority underwater search zone, and also the surface areas covered in the airborne search for floating wreckage in March and April 2014.
References
[1] MH370 – Flight Path Analysis Update, ATSB, 08 October 2014; see Figure 5.
[2] MH370 – Definition of Underwater Search Areas, ATSB, 26 June 2014; ; see Figure20.
[3] Was The MH370 Floating Debris Field Detected From Orbit? Duncan Steel, 23 March 2016
[4] MH370 – Definition of Underwater Search Areas, update, ATSB, 03 December 2015; see page 14.