Where is MH370?
Richard Godfrey
14th February 2016
The search for MH370 continues without success. In a previous post dated 5th January 2016, I asked the question “Is the search for MH370 being conducted in the right area?” Henrik Rydberg of the Independent Group (IG) ran a large Monte Carlo simulation to show that the feasible latitude distribution at 00:11 UTC (i.e. at the 6th Arc) ranged from 29S to 40S. There are, of course, many conceivable flight paths depending on assumed values for the location of the Final Major Turn (FMT) southwards, the speed mode, the autopilot mode, the fuel performance, the altitude, step climbs, lateral offsets, winds, magnetic declination, and whether there was a pilot at the controls or not.
Numerous analyses have been performed, based on differing assumptions, to try and determine (so far as is possible given the limited data, and its inherent imprecision) the final resting place of MH370. The key assumptions that must be made derive from the answers adopted when asking the following questions:
- When and where did the FMT take place?
- Was time spent “loitering” before (or soon after) heading southwards into the Indian Ocean?
- Which autopilot mode was engaged (if any)?
- What was the speed of MH370 heading southward?
- What was the speed mode (ECON 52, constant Mach, LRC, etc.)?
The last speed transmitted from MH370 via ACARS at 17:06:43 was Mach 0.821, which renders a True Air Speed (TAS) of 484 knots and a Ground Speed (GS) of 472 knots. The last ADS-B transmission from MH370 at 17:20:35 was a GS of 471 knots, in accord with the preceding.
Victor Iannello in his analysis dated 18th August 2015 of the available radar data showed that those data are consistent with a speed of Mach 0.84 and Flight Level 340 as MH370 crossed back over the Malaysian Peninsula and then north west over the Malacca Strait.
The maximum cruise speed of the Boeing 777-200ER with Rolls Royce engines is Mach 0.84. The minimum speed with flaps up at an aircraft weight of 200,000 kg and an altitude of 34,000 feet is Mach 0.73, which gives a TAS of 433 knots at an air temperature of -41.0°C (or Indicated Air Speed [IAS] of 250 knots). That minimum speed can be reduced if the altitude is also reduced; for example at 20,000 feet the minimum speed is Mach 0.47, which gives a TAS of 296 knots at an air temperature of -11.9°C (or IAS of 215 knots).
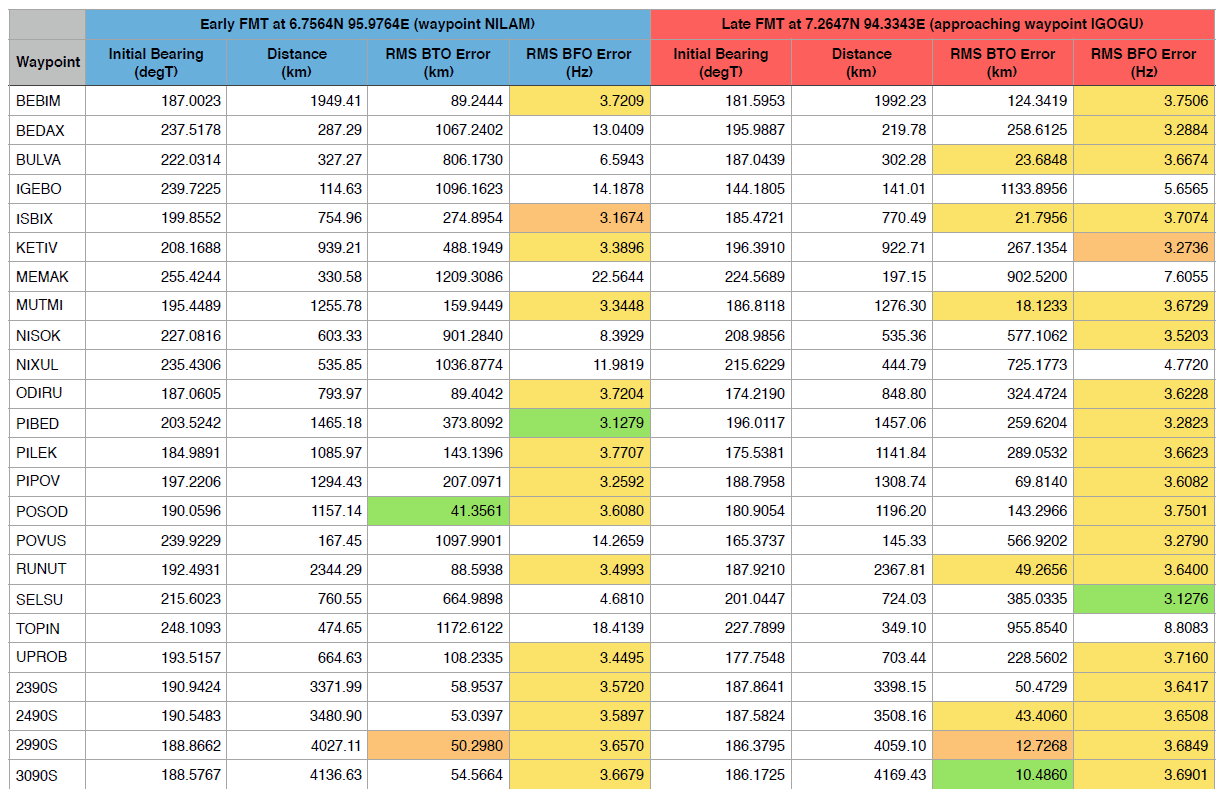
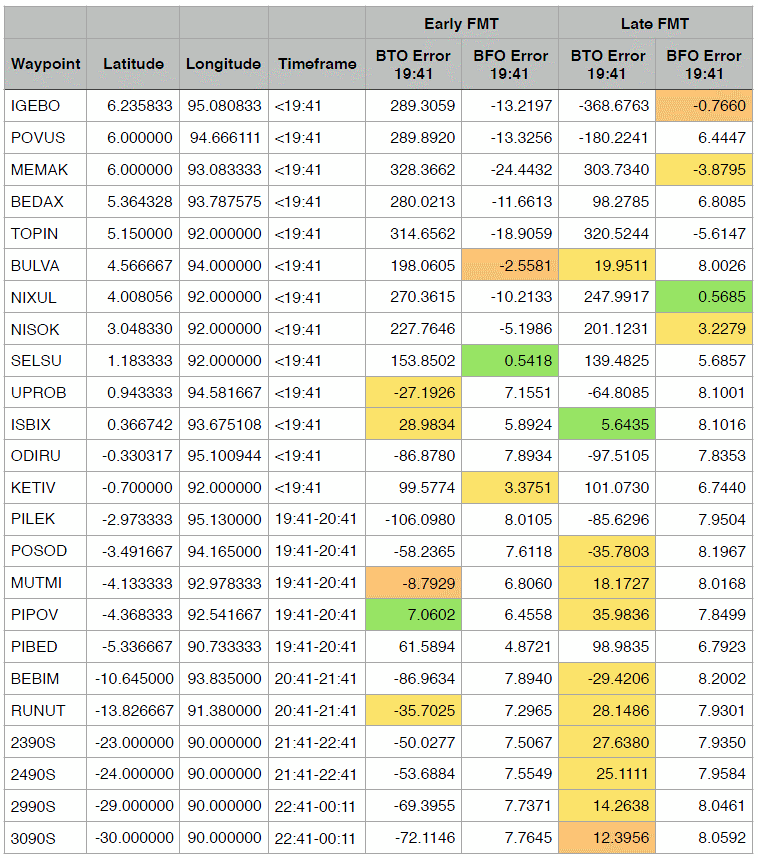
Using my MH370 Flight Path Model I calculated the best fit flight path to the BTO satellite data between 19:41 UTC and 00:11 UTC. I examined all speeds between constant Mach 0.68 and constant Mach 0.84, together with both an early and a late FMT, as well as all autopilot roll modes. I kept the altitude constant at 34,000 feet until 00:11 UTC. (A recent discussion of some of these aspects is available here.)
These modelled flight paths resulted in end points at 00:19 UTC (i.e. on the 7th Arc) lying between 30.5S and 39.3S, considering all speeds, FMT variations and autopilot roll modes.
The results of these calculations for the Late FMT assumption along with a True Track autopilot roll mode are shown in Table 1 below:
The best-fit flight path (as shown in Table 1 above) was in a True Track roll mode from a Late FMT at a constant Mach 0.81 on a course of 186.1°T, resulting in a RMS BTO error of 7.0 km and an end point at 00:19 UTC of 37.3S 89.3E.
The next-best fit flight path was in a Magnetic Heading roll mode from an Early FMT at a constant Mach 0.84 on a course of 195.3°T giving a RMS BTO error of 10.6 km and an end point at 00:19 UTC of 39.1S 87.1E, as in Table 2 below.
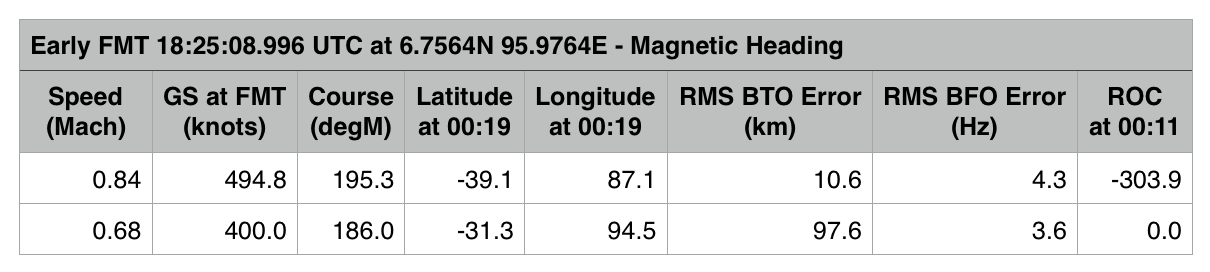
Mach 0.68 and 0.84 (only).
In Brian Anderson’s post dated 20th March 2015, he estimated that the GS of MH370 at the time of the closest approach to the satellite of (i.e. the tangent position, which occurred at 19:52 UTC) was 494 knots and the TAS was 484 knots. Brian used a completely independent method to arrive at that conclusion.
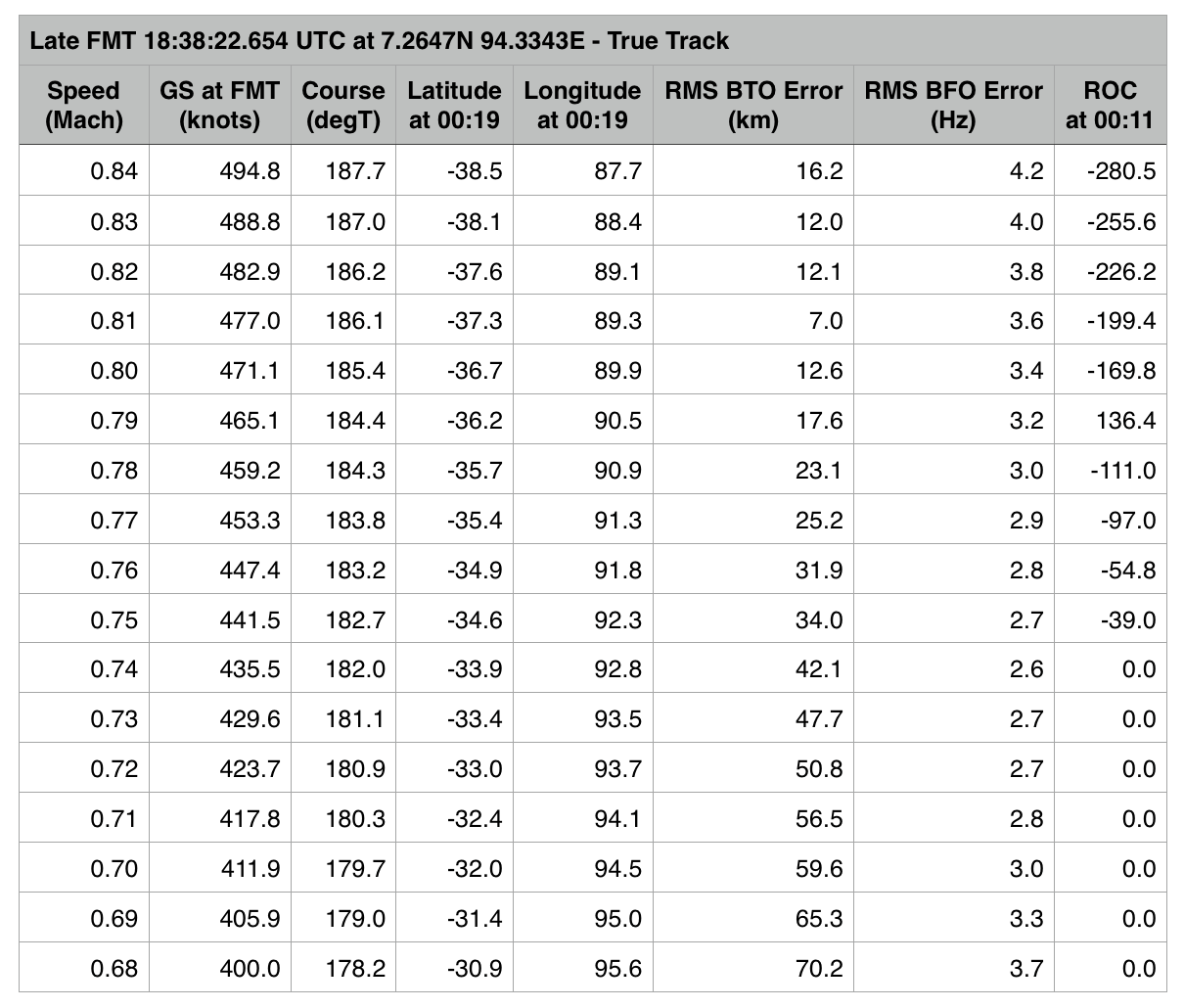
Using my model, the best-fit MH370 flight path identified above, with a True Track roll mode from a late FMT at a constant Mach 0.81 on a course of 186.1°T, is shown in more detail below in Table 3.
At 19:41 the TAS is 480 knots and the GS is 486 knots. The TAS is within 1 per cent of Brian’s result but depends on the air temperature of -41.2°C that was assumed in my model, and the GS is within 2 per cent of Brian’s result but depends on the wind speed of 27.1 knots from a direction 84.7°T that was assumed.
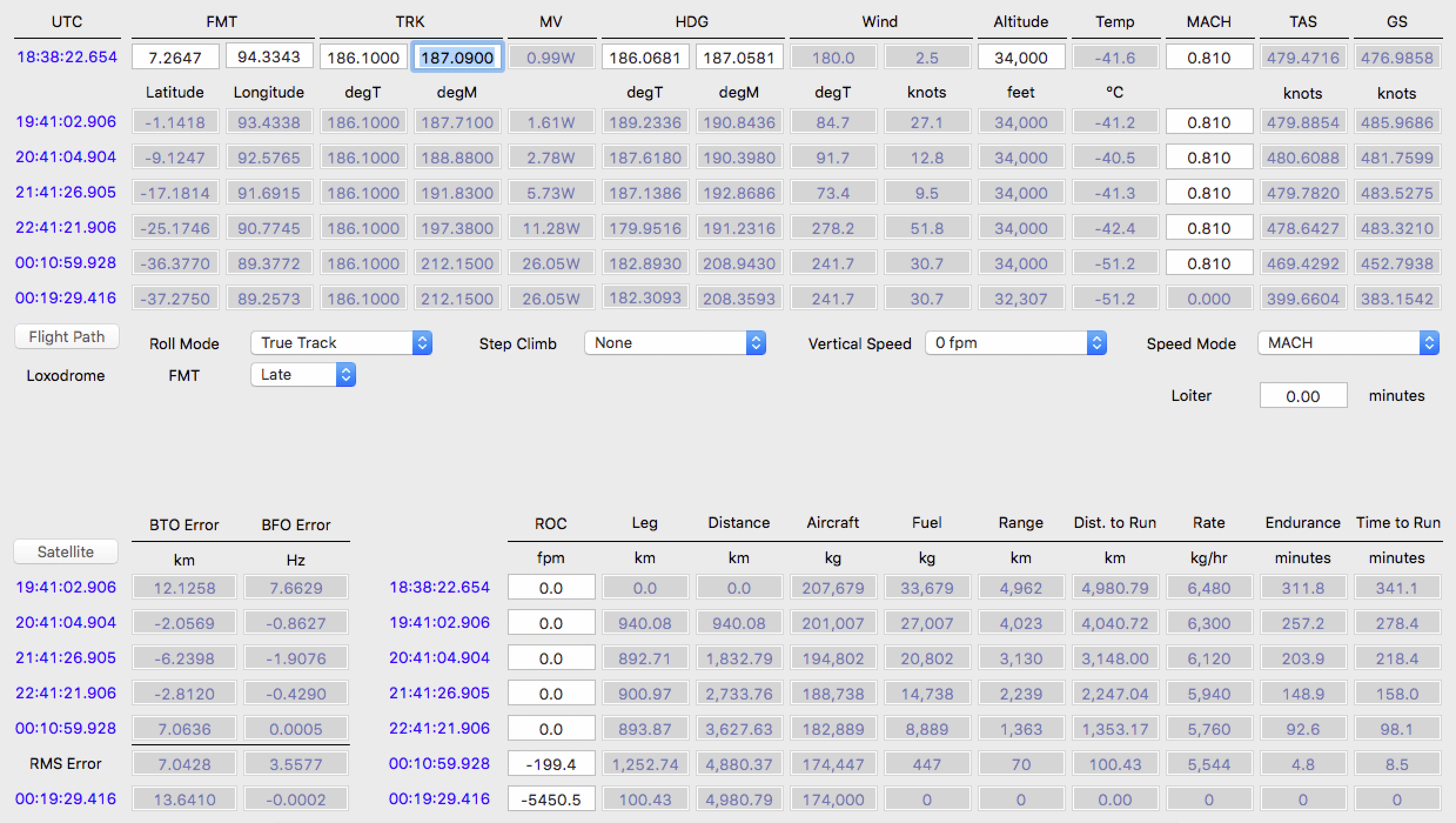
I have tried to follow the principle of making the fewest assumptions possible in arriving at the result of 37.3S 89.3E. These assumptions are:
An outcome of this model and therefore this set of assumptions is that MH370 entered the water soon after 00:19 UTC and within 15 nautical miles of the 7th Arc. As can be seen in Table 3, this result is consistent with the fuel availability/expected exhaustion.
ATSB Search Questions
A valid question to ask is this: If the final resting place of MH370 is near 37S and the 7th Arc, and this area has been searched by the ATSB, why has MH370 not been found?
It could be that the assumptions stated above are incorrect. For example, the speed changed or the altitude changed.
However, the question remains whether the sea bed debris has been missed:
- Are the search path swathes, with a width of 1.8 km, too wide for the side-scan sonar currently employed (900 m either side of the tow fish)?
- Is the sea bed extremely rocky and undulating, requiring narrower search path swathes or multiple overlapping swathes in order to ‘see’ into the sea bed troughs?